![]()
WHOW: het dynamisch plan programma van DolphinSolutions.
Paddy Noë heeft op basis van zijn jarenlange ervaring in de afvalwereld een nieuw planprogramma ontwikkeld. Kennis en ervaring opgedaan met de ontwikkeling van VISTA en Jewel, maar ook met implementaties van PieterBas , AfvalRis en andere ERP pakketten, heeft geleid tot een state of the art programma; WHOW
Het betreft een open programma, wat betekend dat het kan worden aangesloten/ geïntegreerd met bestaande oplossingen, dus als planningsmodule binnen uw ERP systeem, maar ook als zelfstandige oplossing.
De filosofie achter het programma is dat veel meldingen/ opdrachten afkomstig zijn van sensoren, (gewichts)registraties, (taak) opnames, meldingen via een website of een app. Al deze opdrachten worden automatisch ingepland. Het gaat daarbij om meer dan de opdracht in het juiste bakje leggen (sorteren en verdelen), onze algoritmes gaan veel verder. Wij houden rekening met de snel veranderende omgeving en de wens om meer service gericht te werken. Wij gaan verder dan alleen het voorkomen van bijplaatsingen.
De algoritmes zijn een Nederlands product, in Nederland ontwikkeld en blijven zich ontwikkelen omdat wij in nauw contact staan met de klanten en verbeteringen, nieuwe inzichten en technieken snel kunnen doorvoeren.
Onze algoritmes worden gekenmerkt door de volgende zaken:
- Zelf lerende door gebruik te maken van historische data, maar ook op basis daarvan te voorspellen;
- Doorrekenen van scenario’s;
- Alle routes worden ook direct berekend, het is dus ook meteen de meest logische route; op basis van actueel kaartmateriaal;
- Rekening houdend met de vele restricties die er gelden.
WHOW is er niet alleen voor het verwerken van data van vulgraad sensoren, maar ook voor onder- en bovengrondse verzamelcontainers die op frequentie staan, container uitzettingen, grofvuilmeldingen klachten en meldingen (zoals ongedierte bestrijding). Alle berekende routes kunnen direct naar de boordcomputer of navigatiesysteem worden gestuurd.
Aanpassingen op basis van de laatste inzichten van de planner worden direct doorgerekend en zijn beschikbaar voor de chauffeurs door directe communicatie met de navigatie app in het voertuig.
Zeer actueel is nu het snel veranderende aanbiedgedrag van mensen als gevolg van het thuiswerken. Als een programma alleen rekening houdt met historische data kan er nooit een goede voorspelling worden gedaan wanneer de volgende lediging moet plaatsvinden. Tevens gaat het dan niet om 1 containers maar veel containers die allemaal op een ander moment dan hun standaard frequentie moeten worden opgehaald. Dit is echt een hoofdpijn dossier voor planners. WHOW lost dit op door te werken met een rolling forecast, waarin berekend wordt welke container nog iets langer kan wachten, zonder (te) vol te raken. Tevens kunnen scenario’s worden doorgerekend; wat als ik nu 9 uur per dag ga werken, wat als ik een voertuig minder tot mijn beschikking heb ed)
WHOW verwerkt live data, als de boordcomputer of navigatiesysteem de uitgevoerde opdrachten ook afmeldt en terugstuurt. Indien er gebruik wordt gemaakt van de navigatie oplossing van Jewel dan is dit een feit.
De basis oplossing komt van Jewel en wordt al bij vele grote en kleine organisaties toegepast.
Video link: https://youtu.be/XnCEFpEMRAY
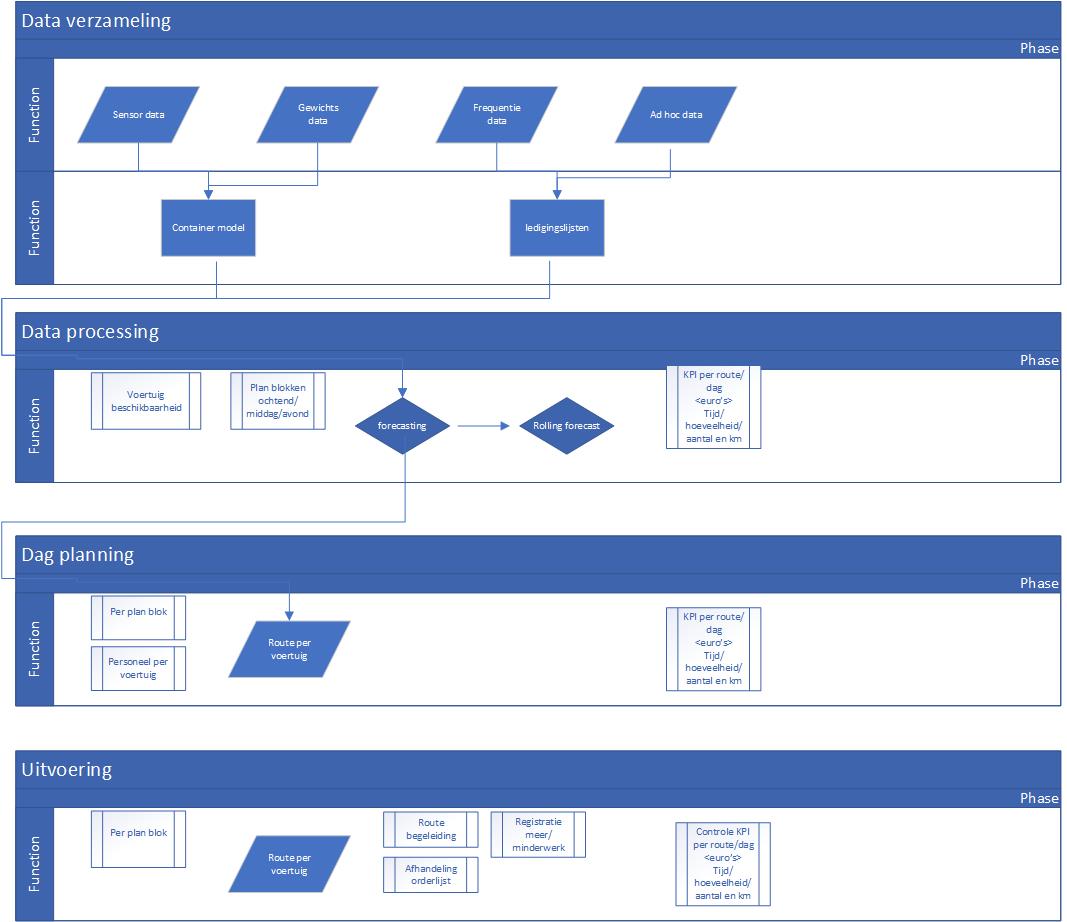
Schematisch is het Dynamischplanprogramma van Dolphin Solutions weergegeven in het bovenstaande schema. Het betreft een doorontwikkeling op bestaande en bewezen Jewel Software.
WHOW, ons dynamisch plansysteem werkt op basis van een containermodel (per container). De sensordata wordt op de server ontvangen. Daar wordt deze gecontroleerd op betrouwbaarheid. Verkeerde metingen worden buiten de berekening van het container model gehouden. Het containermodel geeft een volkans en een variantie (overloopkans). Onze optimalisatie bepaald een verzameling te ledigen containers waarbij de overloopkans van alle andere containers zo klein mogelijk is. Het algoritme gebruikt de dag- en voertuigcapaciteit om hiervoor een juiste verdeling te verkrijgen. Onze optimalisatie berekend zo een optimum over alle (werkdagen) en beschikbare voertuigen, niet alleen voor morgen maar tot ver in de toekomst. Hierdoor wordt voorkomen dat er piekvorming ontstaat.
De berekeningen voor de komende x dagen (instelbaar) wordt exact uitgevoerd. Het is mogelijk door de planning te scrollen en zo de capaciteitsbehoefte in de toekomst te zien. Dit kan van belang zijn voor de lange termijn overzichten (bijv een vakantieplanning).
Het is ons algoritme dat een voorstel doet voor de planner. De planner is in staat extra ledigingen toe te voegen, op basis van zijn ervaring, meldingen of calamiteiten. Deze extra ledigingen kunnen automatisch of handmatig worden ingepland in de route van vandaag (of morgen). Het effect op de toekomst wordt direct doorgerekend (rolling forecast). Dit omdat een extra lediging direct een effect heeft op de volgende lediging
Het dynamisch plansysteem is niet alleen geschikt voor ondergrondse en bovengrondse onderlossende containers, maar voor ieder type planning op basis van opdrachten/ triggers. Denk aan papier/ glas/plastic, grofvuil meldingen, container uitzettingen. Maar ook containertransport van de afvalbrengstations naar verwerkers.
Tevens kan het systeem worden uitgebreid naar APP meldingen zodat de burger bijv een push bericht krijgt wanneer het grofvuil bij hem wordt opgehaald.
![]()
![]()
![]()
![]()
![]()